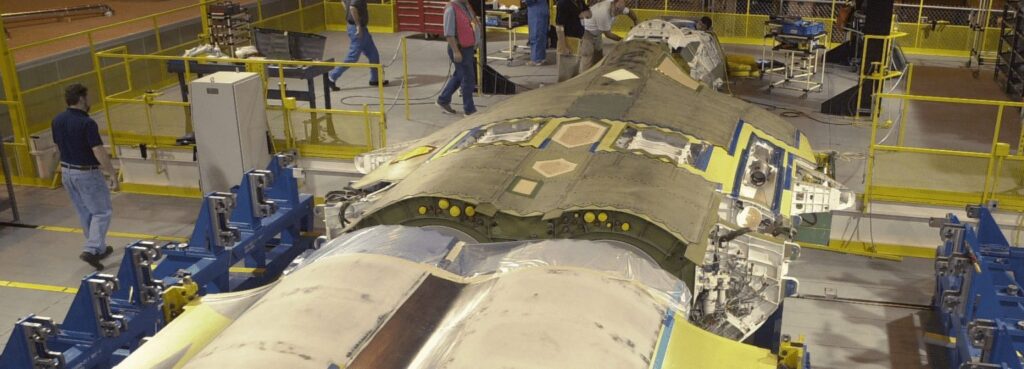
Automating F-22 Aircraft Production
The F-22 vertical stabilizer has a few thousand holes for fasteners that are drilled in a composite/composite stack or a composite/titanium stack. The hole diameters range from very small to quite large at the root. The absolute position of these holes requires a very high accuracy; however, the countersink depth is even more stringent. The countersink depth accuracy requirement is further complicated by the fact that the skin position tolerance is more than 10X greater than the countersink depth tolerance. Yet, the countersink depth is based on where the skin “is”, not where it “should have been”.
Creating the program to position the drill head to drill all the holes is a relatively straightforward process, although the highly automated approach Delta Sigma took to this problem was not the traditional G-code approach. The plunge depth for the drill, however, is determined at every hole to ensure every hole has the perfect countersink. The drill bits used for this system have the countersink cut into the drill bit 0.9 inches up the shank when the bit is new. After resharpening, this value shrinks.
A pressure foot with about 80-pounds of force surrounds the drill bit and has multiple functions:
- Clear away any dust on the surface prior to contact
- Compress the stack to minimize interlaminar burrs during the cut
- Measure where the skin surface is in the drill-plunge coordinate system
- Remove dust and chips during the cut
Just before the pressure foot contacts the surface of the skin an air blast is emitted from the pressure foot to clear away any chips or dust particles that could be left on the skin from drilling a nearby hole. A single particle of composite dust under the pressure foot when it touches the surface can cause the required accuracy to be unmet. During the cut, a strong vacuum passes through the pressure foot to remove over 99% of the composite dust and titanium chips.
The high compression force of the pressure foot causes the skin surface to move as the stack is compressed, or at least it can potentially move, so the plunge depth is a “moving target”. A dust particle in the spindle can cause the tool holder to be slightly displaced causing a countersink depth inaccuracy. Lastly, the location of the drill bit in the tool holder is another potential error source. Clearly, there are a lot of ways for an error to creep into the system, yet we need zero errors across thousands of holes of many sizes, stack depths, and materials.
The pressure foot is measuring the location of the skin with an accuracy of 0.0005 inches every few milliseconds during the drill plunge. If the countersink part of the drill shank is known to have a similar tolerance relative to the pressure foot, very high accuracy countersinks are achievable very fast. This project was to develop a way to measure and calibrate the plunge axis of the drill system in a more direct way than the coupon trial-and-error method that had been historically used.
Delta Sigma Company used a machine vision system Cognix DVT550 smart camera as the image source which also included all the necessary measurement tools. A telecentric lens was used to eliminate optical distortion; on the other side of the drill bit, the backlight source is a Cognex IDRA, red LED light with a diffuser face to provide an even field of illumination.
Moving the drill head to a calibration position where the plunge axis would deploy into the calibration fixture which would push back the pressure foot, measure the angled lines on the countersink part of the drill, then calculate the intersection point of these lines. The vision system is calibrated to the pressure foot position, so the derived intersection point becomes the “calibration” value that will be used to ensure a perfect countersink depth. That calibration number is passed to the motion controller of the drilling machine via an ethernet connection.
Each time a new drill bit is picked up, the drill system will move the drill head to the calibration fixture to measure and calibrate the drill bit. The user can send the system to repeat the calibration if there is any reason to suspect something has changed during a long use of one drill bit.